آموزش عملی نصب سروو موتور دلتا بر روی دستگاه بستنی ساز
با توجه به اینکه برای انتخاب سروو موتور مناسب هر سیستم المانهای مختلفی وجود دارد، لازم است فرد متخصص با در نظر گرفتن شرایط و بودجه، بهترین محصول را انتخاب کند. اولین تجربه نصب سروو موتور برای من بر روی دستگاه بستنی ساز صنعتی است و در این مطلب تجربه خودم را با شما به اشتراک میگذارم.
با توجه به اینکه برای انتخاب سروو موتور مناسب هر سیستم المانهای مختلفی وجود دارد، لازم است فرد متخصص با در نظر گرفتن شرایط و بودجه، بهترین محصول را انتخاب کند. اولین تجربه نصب سروو موتور برای من بر روی دستگاه بستنی ساز صنعتی است و در این مطلب تجربه خودم را با شما به اشتراک میگذارم.
برای راهاندازی سیستم مورد نیاز به چند الکتروموتور القایی که با اینورتر راه اندازی میشوند و نیز یک عدد سروموتور با توان 400 وات از سری B2 دلتا با کد ASD-0421B2 و یک عدد سروو 750 وات ASD-0721A2 دلتا نیاز است. همچنین از PLC سری DVP28SV211T ، اینورتر سری Delta C2000 و مانیتور لمسی HMI دلتا از مدل DOP107BV استفاده کردم.
برای انتخاب مناسبترین پی ال سی برای این سیستم؛ با توجه به اینکه ماشینساز دستگاه اطلاع داده بود که 15 عدد ورودی دیجیتال، 8 عدد خروجی دیجیتال وجود دارد و هیچ ورودی و خروجی آنالوگی وجود ندارد و با توجه به وجود 2 عدد سروو موتور دلتا و اضافه شدن 4 عدد خروجی دیگر، من پی ال سی دلتا DVP28SV11T را انتخاب کردم.
این PLC امکان راهاندازی 4 عدد سروو موتور را در مد پوزیشن دارد، ولی من فقط به دو محور آن برای اینکار نیاز داشتم. نکته قابل توجه این است که در اینجا یکی از اینورترها نیاز به تنظیم سرعت داشت که از خروجی پالس سرعت بالا برای آن استفاده کردم؛ تا مجبور به گذاشتن کارت خروجی آنالوگ و بالا رفتن قیمت نهایی پروژه نشوم. برای انتخاب PLC و اتصال سروو در مد پوزیشن حتما و اکیدا باید سروو نوع ترانزیستوری باشد.
کارفرما از قبل یک عدد سروو سری B2 دلتا در توان 400 وات داشت و برای محور دوم هم قرار شد تا من یک عدد سروو 750 وات سری A2 تهیه کنم. سرووهای سری B2 در مقایسه با سری A2 قیمت پایینتری دارند، با این حال قابلیتهای سری A2 بسیار بیشتر از سری B2 است.
سرووهای 750 وات اساسا چون گشتاور بیشتری از سروو 400 وات دارند بزرگتر هستند و طبیعتا قیمت بالاتری دارند. من چون دنبال کنترل موقعیت بودم سرووها را در مد پوزیشن راهاندازی کردم.
کنترل پوزیشن و سیم بندی سروو درایو دلتا
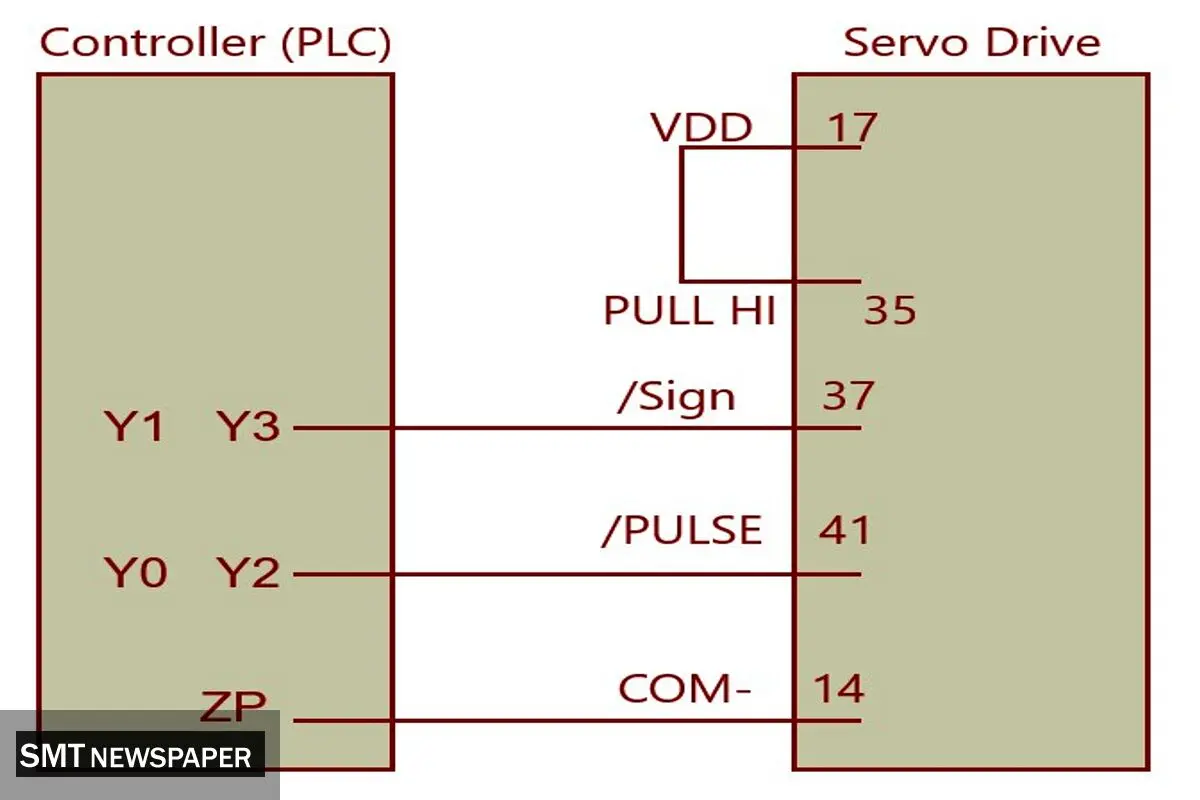
بعد از بستن تابلوها شروع کردم به سیمبندی سرووها و لحیم کردن سوکت CN1 بر روی سرووها که طبق مدار زیر است. البته به غیر از لحیمکاری یک روش دیگر هم هست و آن استفاده از کارتهایی هست که تمام سیمها را لحیم کرده و بصورت ترمینال در اختیار مشتری قرار میدهد. از آنجایی که من به تعداد زیادی ورودی و خروجی نیاز نداشتم و فقط نیاز بود 3 سیم را لحیم کنم و از یک کابل شیلددار برای لحیم کاری استفاده کردم که از بروز نویز هم جلوگیری کنم. برای رساندن میزان نویز به کمترین حد ممکن، یک طرف سیم شیلددار را به منفی منبع تغذیه وصل کردم.
همانطور که در عکس زیر مشخص است دو خروجی از PLC به درایو میرود که خروجیها Y0,Y2 برای پالس سروو و خروجی Y1.Y3 برای کنترل جهت است.

مد کنترلی Position که در واقع به کمک قطار پالس موقعیت موتور و سرعت موتور تعیین میشود. در واقع هر چه فرکانس پالس اعمالی بیشتر باشد، سروو موتور با سرعت بیشتری که ماکزیمم آن برای پروژه ما 3000 دور بر دقیقه بود میچرخد. تعداد پالس هم تعیین کننده مقدار جابجایی موتور است. بطور مثال سرووهای ما با توجه به دقت انکودر موتور و با ضریب گیربکس صفر اگر 160000 پالس به سروو اعمال شود یک دور میچرخد و البته اگر ضریب گیربکس روی عدد 100 قرار بگیرد، آنگاه برای یک دور چرخش سروو موتور به 1600 پالس نیاز دارد.
دستور PLC برای راه اندازی سروو موتور دستگاه بستنی ساز
برنامه زیر یک نمونه برنامه اولیه برای راهاندازی دو محور بوسیله سرووهاست. رجیسترهای D2000 ، D2100 برای انتقال سرعت به سرووها بوسیله قطار پالس هست. مقدار جابجایی هم بوسیله D2002 , D2102 برای کنترل مقدار جابجایی یا در واقع تعداد پالسهای اعمالی استفاده شده است.

دو ریجستر مهم دیگر هم وجود دارد که به ترتیب D1030, D1032 برای دو محور راهاندازی سرو درایو هستند. در واقع تعداد پالس اعمالی بوسیله PLC به سروو در این رجیسترها قابل مشاهده است. به کمک آنها می توان موقعیت سرو موتور و اینکه موقعیت مطلوب رسیده یا خیر را تشخیص داد. البته دو عدد فلگ M1029,M1030 نیز هستند که در زمانیکه به موقعیت مطلوب سروو رسید فعال میگردند.
اعداد K200 هم مربوط به شیب راهاندازی و شیب توقف هستند، که برای جلوگیری از ضربه به سیستم مکانیکی از آنها استفاده شده است. البته دستورات دیگری برای راهاندازی سروو وجود دارد که در منوال هر دستگاه مشخص شده است. این دستور و دستور DPLSY معروفترین و سادهترین راه برای راه اندازی سروو هستند.
M101,M201 برای کنترل جهت سروو است، بطوریکه با فعال شدن این خروجیها سرووها در یک جهت و با غیرفعال شدن آن در یک جهت دیگر شروع به چرخش میکند. روشهای مختلفی برای راهاندازی سروو در مد پوزیشن خارجی یا قطار پالس است که ما از روش پالس و جهت برای کارمون استفاده که PLC هم این روش را ساپورت میکند.
تنظیم پارامترهای سروو موتور دلتا
جدول زیر برای مشخص شدن پارامترهای اعمالی به سرووها است و لازم بذکر است که سرووهای A2,B2 در این مورد دارای تنظیمات یکسان هستند.
|
P1-45 |
P1-44 |
P2-11~P217 |
P02-10 |
|
ضریب گیربکس |
ضریب گیربکس |
0 |
01 0 |
در واقع برای راهاندازی سروو در مد پوزیشن برای یک سروو نو کافی است. پارامترهای ضریب گیربکس مربوط به کالیبره کردن دستگاه است و با توجه به مقدار جابجایی دستگاه باید تنظیم گردد.
موتور سروو بدلیل دارا بودن شبکه CANopen در بسیاری از ماشین آلات CNC استفاده می شود . سروو موتور دلتا در رنج های مختلف توانی و در مدلهای تک فاز و سه فاز موجود میباشد .
سروو موتور به دلیل قیمت اقتصادی و البته طول عمر و دقت بالا بطور گسترده در بازار استفاده میشوند. در شرایط کنونی در بازار ایران موتورهای سری A2 ,B2 برای مدل تک فاز یکسان است. هر دو مدل با دقت 17 بیتی هستند .
در عین حال سروو موتور سری A2 در نوع سه فاز دارای موتورهایی با دقت 20 بیت است. سروو موتور دلتا امکان کنترل دقیق موقعیت، شتاب و سرعت را دارند. سروو دلتا شامل یک موتور مناسب به همراه یک سنسور برای فیدبک میباشد. توان نامی آنها از چند دهم وات تا چند وات متغیر میباشد .
وقتی که سروو را به برق وصل کنیم؛ بعد از تنظیم پارامتر P02-10 شفت سروو موتور قفل میشود که کاملا طبیعی است و جای نگرانی نیست. این قفل شدن شفت موتور به معنی آمادگی برای کار است، در واقع تا وقتی سروو قفل نشود در مد پوزیشن کار نمیکند. برای حرکت اولیه سروو از عملکرد JOG استفاده میشود که در واقع با ورود به پارامتر P04-05 است. بهتر است قبل از اعمال پالس به سروو ابتدا در مد JOG آنرا امتحان کنیم تا از سیمبندی و صحت عملکرد موتور و درایو مطمئن شویم.
منبع: نمایندگی سروو موتور دلتا

